
{kind=link}
{kind=link}
Introduction: From Application to Understanding
In the contemporary landscape of robotics, success is no longer measured solely by task execution or end-user functionality. Modern robotics demands a deep understanding of the underlying principles, computational algorithms, control mechanisms, and implementation strategies that power intelligent machines.
While many popular discussions focus on robotic applications—autonomous delivery, warehouse automation, and humanoid companions—true advancement depends on bridging practical deployment with scientific knowledge and engineering insight. A robot that “works” is notable; a robot whose performance can be analyzed, optimized, and scaled is transformative.
This article presents a comprehensive exploration of robotics from the foundations of sensing, decision-making, and actuation to cutting-edge algorithms and real-world implementation strategies, delivering technical depth and actionable knowledge.
1. Core Principles of Robotics
1.1 Kinematics and Dynamics
- Kinematics describes the relationship between a robot’s joint parameters and its end-effector position and orientation.
- Forward kinematics: computing position from joint angles
- Inverse kinematics: calculating joint angles from a desired position
- Dynamics extends kinematics to include forces and torques required for motion, factoring in mass, inertia, and external disturbances.
- Equations of motion are derived from Newton-Euler formulations or Lagrangian mechanics, forming the foundation for motion planning and control.
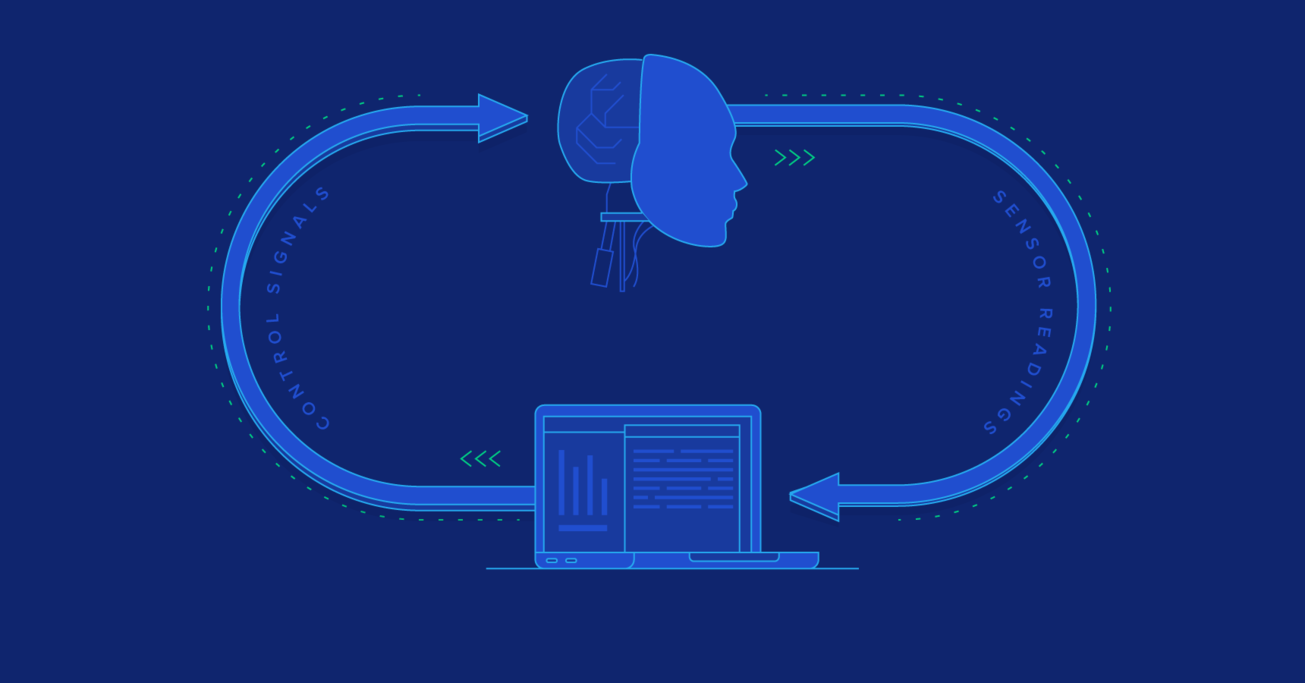
1.2 Sensorimotor Integration
- Robots rely on multi-modal sensors to perceive the environment: cameras, LiDAR, IMUs, tactile sensors, and microphones.
- Sensor fusion mechanisms integrate these heterogeneous data streams to produce robust estimates of state and environment, enabling precise navigation and manipulation.
- Common methods include Kalman filters, particle filters, and deep-learning-based fusion models.
1.3 Control Theory
- Control systems ensure robots respond accurately to commands and environmental feedback.
- Linear and nonlinear controllers (PID, LQR, MPC) govern behavior, with adaptive and robust control addressing uncertainty and dynamic conditions.
- Feedback loops integrate sensor data in real time to minimize error between desired and actual states.
2. Algorithms in Modern Robotics
2.1 Perception and Computer Vision
- Robots employ convolutional neural networks (CNNs), vision transformers (ViTs), and depth estimation models for object recognition, scene understanding, and semantic mapping.
- 3D perception integrates RGB-D cameras or LiDAR to construct point clouds, processed by algorithms such as ICP (Iterative Closest Point) or Voxel-based mapping.
2.2 Localization and Mapping
- Simultaneous Localization and Mapping (SLAM) allows a robot to build a map while estimating its position.
- Approaches include:
- Visual SLAM: uses camera imagery; lightweight but sensitive to lighting
- LiDAR SLAM: robust to lighting; accurate distance measurements
- Sensor-fused SLAM: combines IMU, LiDAR, and camera data for high-precision real-time localization
- Optimization techniques like pose graph optimization and bundle adjustment refine accuracy.
2.3 Path Planning and Motion Optimization
- Robots navigate environments using *graph search (A, Dijkstra), sampling-based planners (RRT, PRM), and optimization-based methods (CHOMP, TrajOpt)**.
- Motion planning algorithms incorporate dynamic constraints, collision avoidance, and energy efficiency.
- Predictive models, such as Model Predictive Control (MPC), allow anticipatory adjustments in real time.
2.4 Reinforcement Learning and Adaptive Behavior
- Reinforcement learning (RL) enables robots to learn complex behaviors through trial-and-error interactions with the environment.
- Algorithms such as Deep Q-Networks (DQN), Proximal Policy Optimization (PPO), and Soft Actor-Critic (SAC) facilitate learning in continuous action spaces.
- RL can complement model-based control, especially for manipulation, locomotion, and multi-agent coordination.
3. Mechanisms and Robotics Architecture
3.1 Actuation Systems
- Robots employ electric motors, hydraulic actuators, and pneumatic systems depending on task requirements.
- Compliant actuators and series elastic actuators (SEAs) enable safer human-robot interaction by absorbing impact and adapting force dynamically.
- Biologically inspired mechanisms, such as tendon-driven joints and soft robotics structures, improve agility and versatility.
3.2 Energy Management
- Efficient energy storage, distribution, and consumption are critical for long-duration operations.
- Battery technology (Li-ion, Li-Po, solid-state) and fast-charging circuits are complemented by AI-driven energy optimization, balancing power supply with computational load and actuation demands.
3.3 Sensor Integration
- Multi-modal sensing supports redundancy and robustness.
- Force, torque, tactile, and proximity sensors feed into high-frequency control loops, enabling responsive manipulation.
- Edge AI platforms allow on-device processing, avoiding latency and network dependency.
4. Implementation Strategies
4.1 Modular Robotics Architecture
- Modular design enables scalable, maintainable, and upgradable systems.
- Components such as sensors, actuators, and computing units are decoupled yet interoperable via standardized communication protocols (ROS 2, DDS).
4.2 Edge Computing and Autonomous Processing
- Localized AI computation reduces latency and cloud dependency.
- Real-time decision-making is critical in autonomous navigation, collision avoidance, and adaptive control.
4.3 Software-Hardware Co-Design
- Algorithms are optimized for processor capabilities, memory bandwidth, and sensor latency.
- Co-design ensures maximum efficiency, reliability, and responsiveness in constrained environments.
4.4 Safety and Compliance
- Safety-critical applications employ redundancy, deterministic controllers, and fail-safe mechanisms.
- Standards such as ISO 13482 (service robots) and ISO 10218 (industrial robots) guide implementation to ensure human-robot coexistence and operational reliability.
5. Case Studies
5.1 Humanoid Robots
- Boston Dynamics’ Atlas combines advanced perception, real-time control, and compliant actuation, allowing for dynamic locomotion such as running, jumping, and object manipulation.
- Implementation integrates edge AI, SLAM-based navigation, and reinforcement learning for motion planning.
5.2 Industrial Cobots
- Collaborative robots in manufacturing utilize force-sensitive actuators and AI-based task scheduling.
- Sensor fusion and predictive algorithms allow cobots to work alongside humans safely while optimizing throughput.
5.3 Autonomous Mobile Robots
- Warehouse robots employ LiDAR-based SLAM, path planning algorithms, and edge AI decision-making to navigate dynamic environments efficiently.
- Energy management and modular battery swaps ensure continuous operation with minimal downtime.
5.4 Service Robots
- Domestic robots, including assistive robots for healthcare, integrate visual perception, natural language processing, and adaptive planning.
- On-device AI ensures privacy compliance, responsive interaction, and contextual task adaptation.
6. Future Directions
6.1 Explainable and Transparent AI
- Understanding not just what the robot does, but why it does it, will be critical for safety and trust.
- Techniques include interpretable neural networks, symbolic reasoning integration, and hybrid AI models.
6.2 Advanced Multi-Robot Coordination
- Edge AI and APUs enable decentralized intelligence for swarms, fleets, and cooperative assembly systems.
- Real-time coordination algorithms allow adaptive task allocation and obstacle avoidance.
6.3 Integration of Soft Robotics and Biomimetics
- Soft actuators, compliant joints, and bio-inspired locomotion mechanisms improve adaptability, safety, and efficiency.
6.4 Continuous Learning and Self-Optimization
- Robots will increasingly update models locally using reinforcement learning or online adaptation, enhancing performance in non-static environments.
6.5 Energy-Aware and Sustainable Robotics
- AI-driven energy management, renewable power integration, and lightweight materials will reduce operational costs and environmental impact.
7. Conclusion
Modern robotics demands deep technical knowledge beyond surface-level applications. Key insights include:
- Principles: Kinematics, dynamics, sensorimotor integration, and control theory form the foundation.
- Algorithms: Perception, SLAM, motion planning, reinforcement learning, and AI inference enable intelligent behavior.
- Mechanisms: Actuation, energy management, sensor integration, and hardware architecture translate algorithms into effective motion.
- Implementation: Modular design, edge computing, co-design, and safety compliance ensure reliable real-world operation.
By understanding not only how robots work, but why and through which mechanisms, engineers and researchers can push the frontier of autonomous, intelligent, and adaptable robotics.
The future of robotics lies in the synergy between knowledge depth, algorithmic sophistication, and practical implementation, ensuring that robots are not just tools but dynamic partners in human environments.