
{kind=link}
{kind=link}
Introduction: The New Frontier of Microrobotics Propulsion
Microrobotics — the science and engineering of robots at millimeter to micrometer scales — has long been constrained by fundamental physical barriers that make movement exceedingly difficult. At these scales, forces such as viscosity and fluid drag dominate, rendering traditional propulsion mechanisms (such as wheels, propellers, or legs) ineffective. Overcoming these barriers not only represents a major scientific breakthrough in core propulsion technology, but also opens vast opportunities across medicine, manufacturing, environmental monitoring, and exploration.
This article provides a comprehensive, professional, and richly detailed examination of the latest original research achievements in micro‑robot propulsion technology — from autonomous swimming through microfluidic environments to shape‑morphing terrestrial‑aerial robots and novel actuation mechanisms. We explore the scientific principles behind the breakthroughs, key examples of cutting‑edge propulsion methods, practical challenges, and the implications for future applications.
1. The Physics of Micro‑Scale Motion — Why Propulsion Is Hard
At the microscale, the rules of motion are fundamentally different from what we experience at macroscopic scales. When a robot shrinks to millimeter or micrometer dimensions:
- Viscous forces dominate over inertial forces, meaning the robot experiences a “thick,” sticky environment where simple pushing no longer produces effective motion.
- Low Reynolds numbers prevail: for micro‑robots swimming in fluid, Reynolds numbers are so low that reciprocal motion (like simple limb flapping) does not result in net displacement.
- Classical Newtonian propulsion fails because drag does not scale down in the same way as propulsion forces for fixed mechanisms.
These fundamental physics constraints have historically limited microrobot mobility and forced researchers to rethink propulsion from first principles, often drawing inspiration from biological microorganisms (e.g., corkscrew motion of bacteria or flagellar movement). Advanced research now combines electrokinetic effects, shape‑morphing actuators, bio‑inspired propulsors, and novel materials to achieve effective microrobot motion.
2. Breakthroughs in Autonomous Micro‑Robot Propulsion
2.1 Near‑Micron Autonomous Robots With Electrical Field Propulsion
One of the most remarkable recent breakthroughs comes from a team at the University of Pennsylvania and the University of Michigan, which developed fully autonomous microrobots with electrical field‑based propulsion that enables locomotion without traditional mechanical parts such as motors or limbs.
These robots are:
- Smaller than a grain of salt (~200 × 300 × 50 µm) and fully autonomous, incorporating onboard computation, memory, sensors, and control.
- Driven by electrokinetic propulsion, where electric fields manipulate ions in fluid to generate motion. At micro‑scales, conventional pushing of fluid fails; instead, the robot creates propulsion by pushing on charged particles in the fluid, which in turn drive water molecules and result in movement.
- Extremely energy efficient, operating on ~75 nanowatts of power provided by light‑powered micro‑solar panels.
- Collaborative and programmable, able to coordinate and communicate via motion patterns akin to insect “dance” behavior, enabling swarm behavior and distributed task execution.
This propulsion innovation represents a paradigm shift: rather than relying on mechanical motion against fluid, the robot exploits field‑mediated forces within the fluid itself to generate motion, opening a new class of propulsion mechanisms for untethered microrobots.
2.2 Terrestrial‑Aerial Micro‑Robots Enabled by Shape‑Morphing Actuators
Another significant propulsion‑related breakthrough comes from Tsinghua University, where researchers developed a thin‑film micro‑robot capable of walking, running, flying, climbing, and shape locking, based on newly designed miniature actuators.
Key features include:
- A novel small‑scale actuator capable of continuous shape morphing and locking, enabling dynamic transitions between locomotion modes (ground movement and flight).
- The integration of this actuator into a lightweight, untethered terrestrial‑aerial robot (9 cm, 25 g) that can adapt its posture and transform actively for propulsion across different environments.
- Ground speeds of up to 1.6 m/s and real‑time transformation into arbitrary shapes, greatly enhancing environmental adaptability and propulsion effectiveness in both terrestrial and aerial contexts.
This kind of multi‑modal locomotion — including running and aerial flight — at micro or small scales demonstrates how actuator innovation directly enables propulsion in diverse environments, far beyond conventional wheeled or legged robots.
2.3 Bio‑Inspired Undulatory Propulsion Mechanisms
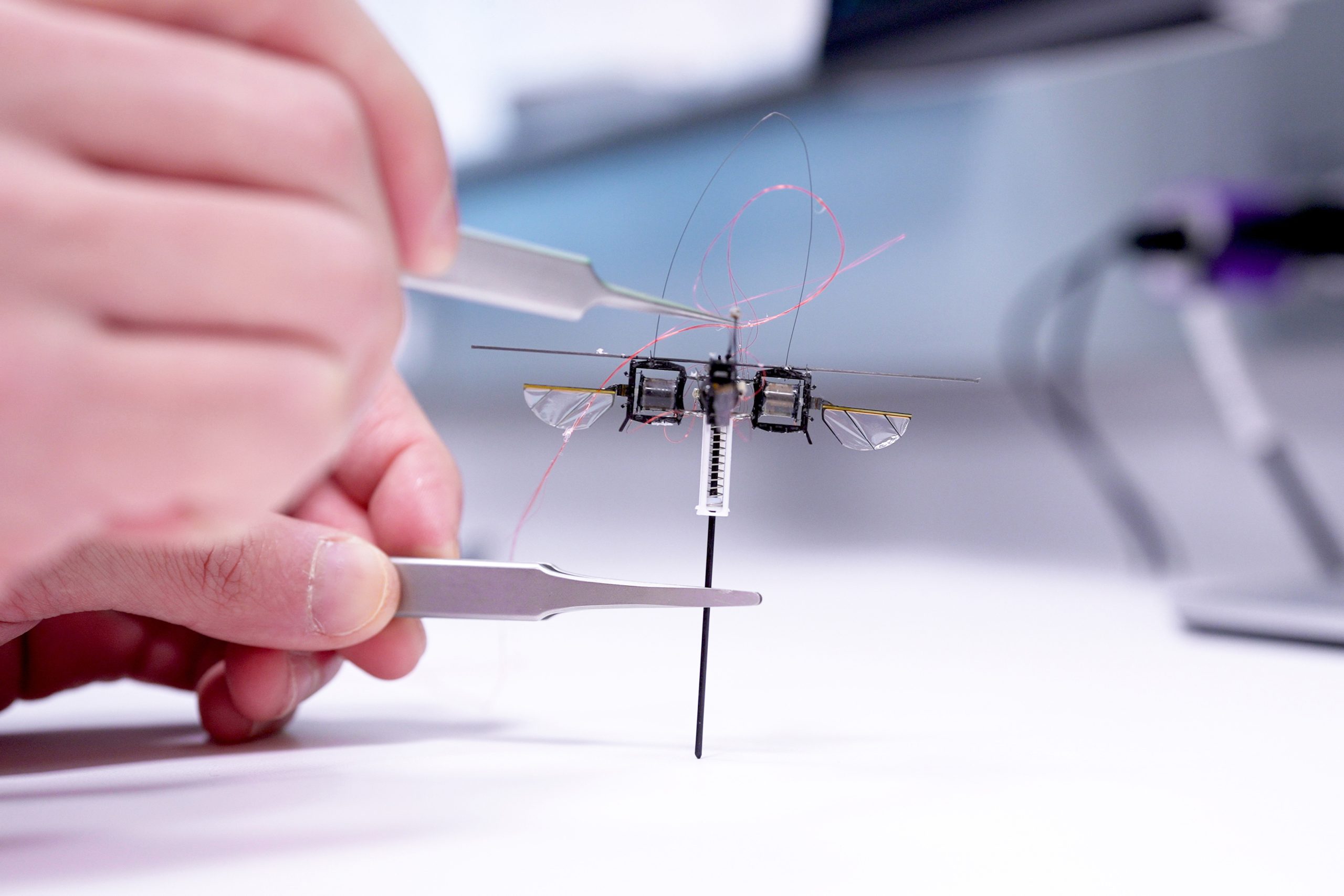
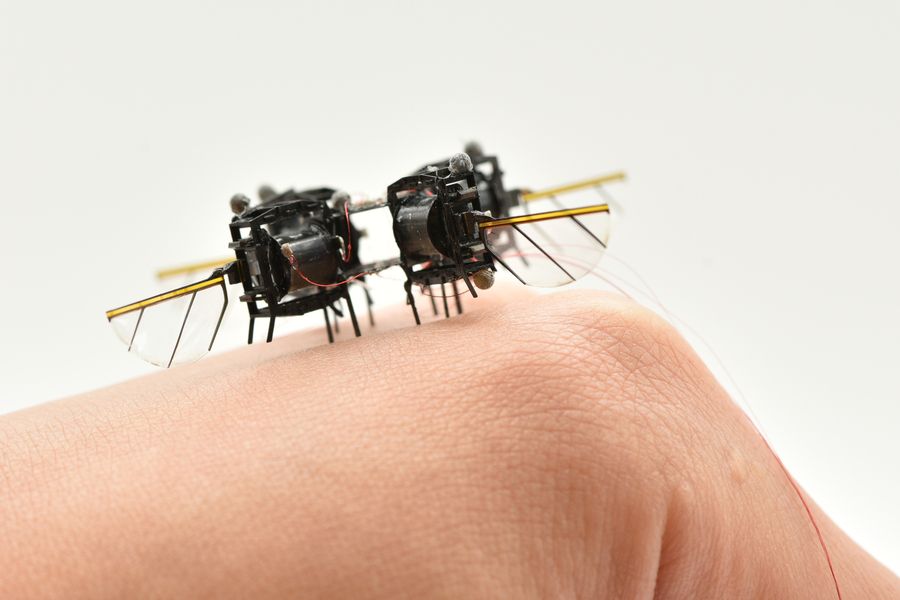
Many research efforts have turned to bio‑inspiration to solve micro‑scale locomotion challenges. One notable example is the VLEIBot, a microrobotic swimmer driven by a bio‑inspired anguilliform (eel‑like) propulsor.
Highlights include:
- A micro‑robot weighing 45 mg and measuring only a few tens of milligrams in volume that can undulate its body using shape‑memory alloy (SMA) actuators.
- Propulsion through fluid by generating traveling waves along a flexible body, similar to how eels swim, allowing movement despite low Reynolds number constraints.
- Speeds of up to 15–16 mm/s, with two‑direction controllability in planar fluid environments.
This anguilliform locomotion demonstrates how flexible body waves combined with micro‑actuation can overcome viscous dominance and achieve effective swimming at tiny scales.
2.4 Soft Robots and Complex Environment Locomotion
Soft microrobots, capable of passive shape adaptation and lateral motion in confined spaces, also represent an important advance in micro‑propulsion:
- The mCLARI robot, though slightly larger at millimeter dimensions (~20 mm), uses passive body compliance and active leg actuation for omnidirectional terrain‑adaptive locomotion in laterally restricted spaces — a paradigm for propulsion in cluttered or complex environments.
Such shape‑morphing locomotion enables robots to propel themselves through constrained regions — a crucial capability for search, rescue, or internal body navigation applications.
2.5 Sound‑Wave Driven Micro‑Propulsion
Alternative actuation strategies, such as the use of sound waves to propel microrobots through narrow channels, point to innovative non‑mechanical propulsion mechanisms:
- A research team demonstrated how acoustic fields interacting with helical robot structures create fluid vortices that push microrobots forward through fluids, allowing tunable speed and directional control by varying acoustic frequency.
This approach suggests that fields and waves — whether electrical, acoustic, or magnetic — can be harnessed as effective propulsion drivers in regimes where traditional motors fail.
3. Enabling Technologies Behind Propulsion Innovation
3.1 Micro‑Actuators and Shape‑Morphing Materials
Cutting‑edge materials and actuation systems are key to enabling micro‑robot propulsion:
- Novel thin‑film actuators with continuous shape morphing and locking capability allow robots to alter propulsion structures dynamically.
- Shape‑memory alloys (SMAs) provide high work density relative to their mass, enabling undulatory motion in micro‑robots.
- Emerging materials like liquid crystalline elastomers allow micro‑robots to respond to light or thermal stimuli for locomotion without traditional motors.
These advanced materials and actuator mechanisms — combining flexibility, actuation, and structural rigidity — are fundamental to breakthroughs in microrobotic propulsion.
3.2 Precision Fabrication Techniques
Advances in micro‑ and nano‑scale fabrication — including precision micro‑3D printing and microelectromechanical systems (MEMS) — have enabled the creation of intricate propulsion structures and integrated systems:
- High‑precision 3D printing techniques facilitate the fabrication of complex micro‑robot bodies and actuators with micron‑level accuracy.
- MEMS fabrication allows the integration of micro‑actuators, sensors, and structural elements into a single compact assembly capable of locomotion at microscale.
Without these manufacturing enablers, theoretical propulsion mechanisms could not be realized in practical robotic platforms.
4. Challenges and Key Research Frontiers
4.1 Power Supply and Energy Efficiency
Microrobot propulsion is tightly coupled with energy constraints:
- Onboard power sources are limited by size; innovations like light‑powered micro‑solar energy harvesting reduce dependence on tethers.
- Efficient use of energy in propulsion — especially in high drag environments — remains a research priority.
Future breakthroughs may emerge from hybrid energy harvesting (light, thermal, chemical) and ultra‑low power electronic control systems.
4.2 Control and Navigation at Micro‑Scale
Precise control of propulsion and trajectory in viscous or unpredictable environments is challenging:
- Navigation in fluid environments requires robust feedback and sensing integrated with propulsion mechanisms.
- Fine‑grained control strategies, often inspired by biological locomotion and neural control models, will be essential for practical deployment.
5. Applications Driven by Propulsion Breakthroughs
5.1 Targeted Medical Interventions
Propulsion‑capable microrobots could transform medicine:
- Targeted drug delivery, navigating through blood vessels or tissue to deliver therapeutics precisely where needed.
- Clearing infections or obstructions, demonstrated conceptually by swarms of tiny robots capable of penetrating viscous biological environments.
- Cell‑level diagnostics and microsurgery, where microrobots traverse narrow pathways unreachable by conventional tools.
5.2 Microscale Manufacturing and Sensing
In industrial contexts:
- Microrobots could assemble tiny components with high positional precision, enhancing micro‑device production.
- Propulsion‑enabled robots could navigate complex fluidic environments for chemical processing or environmental monitoring.
5.3 Advanced Environmental and Search Applications
Beyond medicine and manufacturing, propulsion‑advanced micro‑robots could explore:
- Soil or pore spaces in environmental studies.
- Biological ecosystems at tiny scales, unveiling dynamics currently inaccessible to traditional probes.
Conclusion: A New Era for Microrobotic Propulsion
Recent original research breakthroughs in microrobot propulsion — from electrokinetic swimming at sub‑millimeter scales to shape‑morphing terrestrial‑aerial multimodal locomotion — signify a paradigm shift in how robots move in challenging environments. These advances are enabled by electromagnetic field manipulation, bio‑inspired propulsion mechanisms, novel actuators, and precision fabrication. As these technologies progress toward practical application, we stand on the cusp of deploying truly autonomous microrobots for medicine, manufacturing, and scientific discovery, reshaping how humans interact with the microscopic world around us.