
{kind=link}
{kind=link}
Introduction
The pace of innovation in robotics and artificial intelligence (AI) is accelerating at an unprecedented rate. However, traditional research and development (R&D) approaches often face barriers such as high hardware costs, limited access to quality datasets, and siloed knowledge between organizations. In response, the combination of open data initiatives and global collaborative networks has emerged as a transformative force. By sharing datasets, simulation environments, and development tools across borders and organizations, the robotics and AI community is lowering the entry barriers for innovation, fostering rapid iteration, and enabling breakthroughs in real-world applications.
This article provides a comprehensive exploration of how open data and global collaboration reshape R&D processes. It examines the conceptual foundations, technical mechanisms, prominent platforms, impact on innovation cycles, and challenges and strategies for effective global cooperation. Additionally, it discusses case studies from both academia and industry, emphasizing the role of shared knowledge in accelerating technological progress. The aim is to illustrate why open data and collaborative frameworks are now critical drivers of the next-generation robotics and AI ecosystem.
1. Understanding Open Data and Global Collaboration in R&D
1.1 Definition of Open Data
Open data refers to datasets, algorithms, models, and research outputs that are freely accessible, reusable, and shareable under permissive licenses. In robotics and AI, this includes:
- Robot sensory datasets (e.g., LiDAR scans, RGB-D imagery, tactile measurements)
- Simulation environments for task training (e.g., physics-based simulators)
- Pretrained AI models and algorithmic frameworks
- Benchmarking datasets for evaluation
The key characteristic is transparency and interoperability, allowing researchers and developers worldwide to validate, extend, and integrate existing resources into new applications.
1.2 The Role of Global Collaboration
Global collaboration refers to cross-institutional and cross-national cooperation in research and technology development. This can take the form of:
- Academic consortia coordinating multi-lab experiments
- Industry-academia partnerships sharing experimental resources
- Open-source software frameworks maintained by international communities
- Collaborative competitions and challenge-driven platforms
Through collaboration, organizations can pool resources, avoid duplication of effort, and accelerate knowledge transfer—effectively compressing R&D timelines.
2. Historical Context and Drivers
2.1 Early Barriers to Robotics R&D
Historically, robotics R&D faced several constraints:
- High cost of robot hardware and custom components
- Proprietary datasets and closed research environments
- Limited computing power for AI training
- Fragmentation across laboratories and commercial entities
These limitations created significant entry barriers, restricting innovation to well-funded institutions.
2.2 Emergence of Open Data Initiatives
The mid-2010s marked a turning point with initiatives such as:
- KITTI and Cityscapes datasets for autonomous driving research
- OpenAI Gym for reinforcement learning experimentation
- YCB Object and Model Set for standardized manipulation research
These initiatives provided shared resources that enabled smaller labs and startups to engage in high-quality robotics research without replicating infrastructure investments.
2.3 The Globalization of Research
Global collaboration became more feasible due to:
- Internet-based sharing of datasets and models
- Cloud computing and distributed simulation frameworks
- Cross-border research consortia (e.g., K-Humanoid Alliance, IEEE Robotics and Automation Society collaborations)
This environment fosters rapid knowledge diffusion and distributed innovation, making breakthroughs less constrained by geography or institutional capacity.
3. Technical Mechanisms Enabling Open Collaboration
3.1 Standardized Datasets and Benchmarking
Standardized datasets create a common evaluation ground. For example:
- Object manipulation datasets allow robots to train grasping policies across a variety of shapes and textures
- Multimodal human-robot interaction datasets provide labeled examples for natural language understanding, gesture recognition, and emotion inference
Benchmarking ensures reproducibility, comparability, and scalable learning pipelines for multiple organizations.
3.2 Simulation Environments
High-fidelity simulation platforms reduce dependency on physical robot hardware. Examples include:
- NVIDIA Isaac Sim and Omniverse for physics-based simulation
- PyBullet and MuJoCo for reinforcement learning and control experiments
- Webots for educational and industrial prototyping
Simulations enable researchers to iterate rapidly and safely, bridging gaps between concept validation and real-world deployment.
3.3 Open-Source Frameworks
Open-source software frameworks facilitate collaborative development. Notable examples:
- ROS (Robot Operating System): modular middleware for robot software
- OpenAI Gym & Isaac Gym: platforms for RL and embodied AI experiments
- PyTorch and TensorFlow: widely adopted AI model development frameworks
These frameworks standardize workflows, reduce duplicated effort, and enable integration of experimental methods across institutions.
4. Accelerating Innovation Through Shared Resources
4.1 Lowering R&D Barriers
Open data and global collaboration reduce the cost and complexity of R&D by:
- Providing pre-labeled datasets for training and evaluation
- Allowing virtual experimentation before physical deployment
- Enabling access to community-tested algorithms and model architectures
- Facilitating knowledge transfer via publications, forums, and workshops
Consequently, startups, academic labs, and emerging economies can participate in cutting-edge research without prohibitive investment.
4.2 Promoting Rapid Iteration
Shared resources accelerate innovation cycles by:
- Allowing teams to repurpose and extend existing datasets
- Providing common benchmarks to validate progress quickly
- Encouraging cross-pollination of ideas through collaborative platforms
- Supporting continuous learning pipelines that integrate new data in real time
This creates an iterative feedback loop where improvements propagate rapidly across the global community.
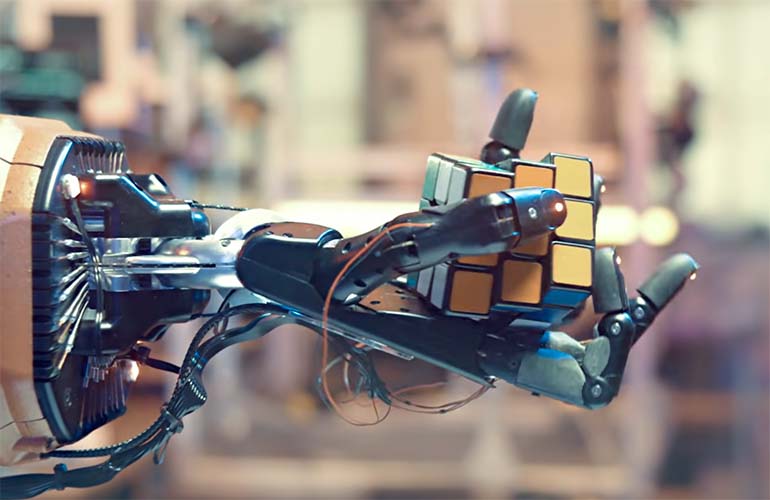
4.3 Case Study: OpenAI and Robotics Research
OpenAI demonstrated the value of open collaboration and shared data in robotics through:
- Rubik’s Cube manipulation experiments using a combination of simulation and real-world trials
- Publishing datasets, environment models, and code that allow other researchers to replicate and improve experiments
- Enabling researchers globally to advance reinforcement learning in high-dimensional physical tasks without proprietary constraints
5. Global Collaborative Platforms
5.1 K-Humanoid Alliance
A consortium focused on cross-institutional humanoid robotics research, enabling:
- Standardized datasets for locomotion, grasping, and perception
- Multi-lab experimental validation and benchmarking
- Joint publications and international competitions
5.2 IEEE Robotics and Automation Society
Facilitates international conferences, workshops, and journals, promoting:
- Knowledge sharing across academia and industry
- Standardization of robotics datasets and evaluation metrics
- Collaborative open-source toolkits for AI and robot control
5.3 International AI Challenges
Competitions like RoboCup, DARPA SubT Challenge, and NeurIPS RL Competitions encourage collaborative problem solving and dataset sharing. Benefits include:
- Rapid development of high-performing algorithms
- Exposure to diverse problem settings and global perspectives
- Acceleration of the state of the art in robotics and AI
6. Enabling Multimodal Data Sharing
Modern robotics increasingly relies on multimodal data:
- Visual data: RGB, depth, thermal imagery
- Auditory data: speech, environmental sounds
- Tactile data: force, pressure, haptic signals
- Proprioceptive data: joint positions, torques
Global collaboration allows integration of diverse datasets, supporting training of models capable of cross-domain perception and action.
7. Open Data and Industry Innovation
7.1 Startups and SMEs
Open data levels the playing field for smaller organizations, enabling:
- Rapid prototyping without large capital expenditure
- Participation in AI competitions and research consortia
- Accelerated deployment of robotics solutions in logistics, healthcare, and manufacturing
7.2 Established Companies
Large corporations benefit by:
- Reducing duplicated internal experimentation
- Collaborating with academic and industry partners to co-develop advanced robotics frameworks
- Accelerating technology transfer from research to market
7.3 Case Study: Autonomous Vehicles
Shared open datasets like Waymo Open Dataset and nuScenes accelerate autonomous vehicle development by:
- Providing annotated driving scenarios
- Enabling cross-company benchmarking
- Reducing barriers for global startups to test and validate AI models
8. Challenges in Open Data and Global Collaboration
Despite the benefits, several challenges persist:
8.1 Data Quality and Standardization
- Inconsistent formats across datasets
- Lack of uniform annotation standards
- Limited representation of real-world complexity
8.2 Intellectual Property and Licensing
- Balancing openness with commercial interests
- Negotiating shared use of proprietary data
- Ensuring legal compliance across jurisdictions
8.3 Security and Privacy
- Sharing sensor data from human environments raises privacy concerns
- Mitigating risks of sensitive information exposure requires robust anonymization
8.4 Coordination and Governance
- Global collaboration demands standardized protocols, metrics, and evaluation methods
- Requires transparent contribution and maintenance practices
9. Strategies for Effective Global Collaboration
To maximize impact, organizations can adopt several strategies:
- Adopt standard data formats to ensure interoperability
- Use open licenses that balance accessibility with IP protection
- Promote transparent documentation for datasets and model architectures
- Engage in multi-institution consortia to share resources and responsibilities
- Integrate simulation and real-world experimentation for scalable R&D
- Foster cross-disciplinary teams combining AI, robotics, software, and domain expertise
10. Future Directions
The trajectory of open data and global collaboration suggests:
- Expanded open-access robotics datasets encompassing diverse environments, objects, and tasks
- Integration with foundation models to accelerate transfer learning across domains
- Cloud-based collaborative platforms providing real-time data sharing and multi-agent coordination
- Ethical frameworks and governance structures for global, multi-stakeholder participation
This evolution will dramatically compress R&D cycles, reduce costs, and democratize participation in robotics innovation worldwide.
Conclusion
Open data and global collaboration are catalysts transforming the landscape of robotics and AI research. By lowering R&D barriers, enabling rapid iteration, and fostering shared innovation, these practices empower both established organizations and emerging startups to contribute to a global ecosystem of intelligent machines. As datasets, simulation tools, and collaborative frameworks continue to expand, the potential for cross-domain, autonomous, and adaptive robotics grows exponentially.
The future of robotics is not just about individual innovation but about a cooperative, open, and globally integrated approach, where shared resources accelerate progress and democratize access to technological breakthroughs. By embracing open data and fostering international collaboration, the robotics community is ensuring that the next generation of intelligent machines will evolve faster, safer, and more inclusively than ever before.