
{kind=link}
{kind=link}
Introduction: The End of the “Lab-Only” Era in Robotics
For decades, robotics research has flourished inside laboratories, universities, and controlled pilot facilities. In these environments, robots demonstrated impressive capabilities: precise manipulation, advanced perception, autonomous navigation, and increasingly intelligent decision-making driven by artificial intelligence. Yet, despite this progress, a persistent gap remained between laboratory success and industrial reality.
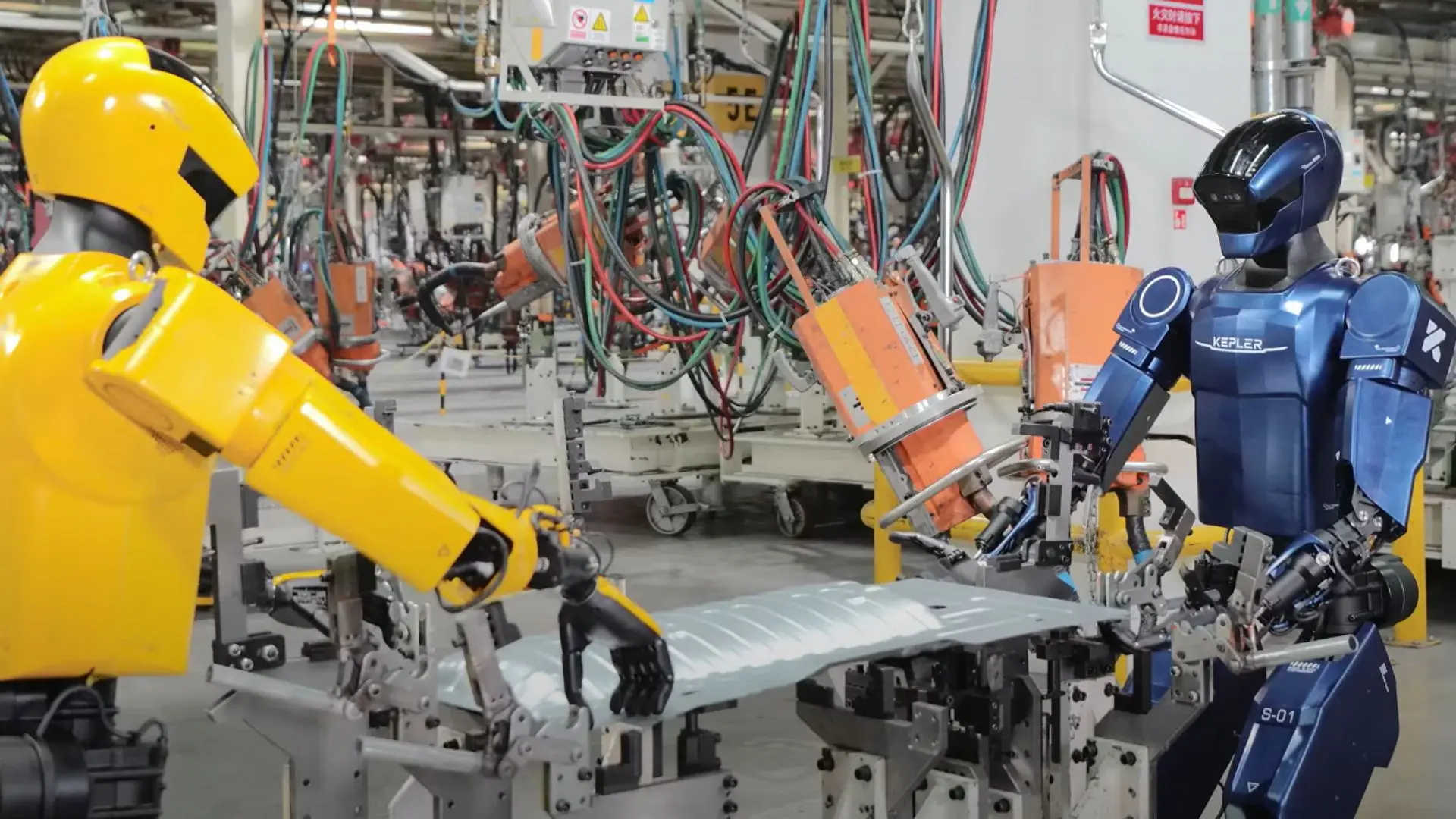
Today, that gap is narrowing rapidly. Robots are no longer confined to demonstration videos or experimental setups. Instead, they are entering real production environments—factories, warehouses, hospitals, construction sites, and energy facilities—where conditions are unpredictable, safety requirements are strict, and economic performance matters as much as technical capability.
This transition represents one of the most profound shifts in the history of robotics. Moving from the lab to the real world is not simply a matter of scaling up; it requires rethinking robot design, intelligence, reliability, human interaction, and integration with existing industrial systems. This article explores how and why robots are making this leap, the technologies enabling it, the challenges involved, and what it means for the future of manufacturing and work.
1. Why Robots Stayed in the Lab for So Long
1.1 Controlled Conditions vs. Real-World Complexity
Laboratories offer ideal conditions: stable lighting, predictable layouts, known objects, and minimal human interference. Real production environments, by contrast, are filled with variability:
- Changing materials and components
- Dust, vibration, and noise
- Dynamic human activity
- Tight safety and compliance requirements
Traditional robots struggled with such variability, making them difficult to deploy outside controlled settings.
1.2 Economic and Operational Barriers
Even when robots could technically perform tasks, deployment often failed due to:
- High integration costs
- Long commissioning times
- Inflexible programming
- Limited adaptability to new tasks
As a result, many companies viewed robotics as a high-risk investment, suitable only for stable, high-volume production.
2. The Turning Point: Why Now?
2.1 Advances in Artificial Intelligence
Modern robots are increasingly powered by AI systems capable of perception, learning, and decision-making. Key breakthroughs include:
- Deep learning for vision and object recognition
- Reinforcement learning for adaptive control
- Vision-language-action models enabling intuitive task specification
These advances allow robots to handle uncertainty and variation, a prerequisite for real-world deployment.
2.2 Improved Hardware and Sensors
Hardware innovation has also played a critical role:
- High-resolution 3D cameras and LiDAR
- Force and torque sensors for safe manipulation
- Lightweight materials and energy-efficient actuators
Together, these components make robots more capable, safer, and more responsive.
2.3 Industrial Demand and Workforce Pressures
Global industries face labor shortages, aging workforces, and rising costs. Robots are increasingly seen not as replacements, but as necessary partners that can sustain productivity and competitiveness.
3. From Specialized Automation to General-Purpose Robotics
3.1 The Limits of Traditional Industrial Robots
Classic industrial robots excel at repetitive, pre-programmed tasks, such as welding or painting. However, they are:
- Fixed in place
- Difficult to reprogram
- Unsuitable for dynamic environments
This rigidity limits their usefulness in modern, flexible production systems.
3.2 The Rise of Flexible and Mobile Robots
New generations of robots emphasize:
- Mobility instead of fixed installation
- Software-driven behavior
- Rapid redeployment across tasks
Mobile manipulators, collaborative robots, and humanoid platforms represent a shift toward general-purpose robotics.
4. Human-Centered Design: Robots in Shared Workspaces
4.1 Collaboration Instead of Isolation
In real factories, robots must coexist with humans. This requires:
- Safe human-robot interaction
- Predictable and transparent behavior
- Shared task planning
Collaborative robots (cobots) and humanoid robots are designed specifically for such environments.
4.2 Safety as a Core Design Principle
Moving robots out of cages demands advanced safety mechanisms:
- Real-time collision detection
- Force and speed limiting
- Redundant sensing and control systems
Safety is no longer an afterthought; it is a fundamental design requirement.
5. Integration into Existing Production Systems
5.1 IT/OT Convergence
Real-world deployment requires robots to integrate with:
- Manufacturing execution systems (MES)
- Enterprise resource planning (ERP)
- Quality control and traceability systems
This convergence of IT and operational technology (OT) enables robots to become active participants in production workflows.
5.2 Digital Twins and Simulation
Before robots ever touch the factory floor, their behavior is tested in virtual environments. Digital twins allow engineers to:
- Simulate tasks and workflows
- Identify bottlenecks and risks
- Optimize performance before deployment
This dramatically reduces integration time and risk.
6. Case Studies: Robots in Real Production Environments
6.1 Manufacturing and Assembly
Robots are increasingly used for:
- Material handling and kitting
- Assembly assistance
- Inspection and quality assurance
In aerospace and electronics manufacturing, robots help workers in confined or ergonomically challenging spaces.
6.2 Warehousing and Logistics
Autonomous mobile robots (AMRs) now handle:
- Order picking and transport
- Inventory management
- Goods-to-person workflows
These systems operate continuously in dynamic environments, demonstrating real-world robustness.
6.3 Healthcare and Laboratories
Robots in hospitals and labs perform:
- Sample handling and preparation
- Disinfection and cleaning
- Logistics within medical facilities
These applications demand high reliability and strict safety compliance.
7. Measuring Success: Beyond Technical Performance
7.1 Reliability and Uptime
In production environments, even short downtime can be costly. Robots must demonstrate:
- High mean time between failures
- Predictable maintenance schedules
- Robust recovery from errors
7.2 Economic Viability
Successful deployment depends on clear economic benefits:
- Increased throughput
- Reduced injury and fatigue
- Lower operational costs over time
Return on investment (ROI) is often the ultimate deciding factor.
8. Workforce Transformation and Skills Evolution
8.1 Changing Roles for Human Workers
As robots take on physical and repetitive tasks, human roles shift toward:
- Supervision and coordination
- Quality control
- Continuous improvement and innovation
This transformation requires reskilling and new training programs.
8.2 Building Trust Between Humans and Robots
Trust is essential for collaboration. Workers must understand:
- What robots can and cannot do
- How robots make decisions
- How to intervene when necessary
Transparent design and training are critical.
9. Remaining Challenges and Open Questions
9.1 Generalization and Adaptability
Despite progress, robots still struggle with:
- Unseen objects and scenarios
- Highly dexterous manipulation
- Complex reasoning in physical environments
Bridging these gaps remains an active area of research.
9.2 Regulation and Standards
As robots enter shared spaces, regulators must address:
- Safety certification
- Liability and accountability
- Ethical considerations
Clear standards are essential for large-scale adoption.
10. The Road Ahead: Toward Autonomous Production Systems
10.1 Continuous Learning Robots
Future robots will not be static systems. They will:
- Learn from experience
- Share knowledge across fleets
- Improve performance over time
This capability will further accelerate real-world adoption.
10.2 Factories as Adaptive Ecosystems
In the long term, production environments may evolve into:
- Highly adaptive systems
- Orchestrated by AI
- Populated by diverse robotic agents
Robots will become integral components of these ecosystems, rather than isolated tools.
Conclusion: A Defining Moment for Robotics
The movement of robots from laboratories into real production environments marks a defining moment in the evolution of robotics. It reflects decades of progress in AI, hardware, and systems integration, combined with urgent industrial needs.
While challenges remain, the direction is clear: robots are becoming practical, collaborative, and economically viable tools for real-world work. This transition is not just a technological shift—it is a transformation in how humans design, operate, and interact with production systems.
As robots continue to mature, their presence in real production environments will no longer be exceptional. It will be expected. And in that future, the true measure of robotic intelligence will not be what works in the lab, but what delivers value, safety, and reliability in the real world.