
{kind=link}
{kind=link}
Introduction
Soft robotics represents a paradigm shift in robotics, moving away from rigid, metallic structures toward flexible, compliant, and non-metallic designs. Inspired by biological organisms, soft robots can safely interact with humans, adapt to unstructured environments, and perform complex manipulations that traditional rigid robots struggle with.
The development of non-metallic bodies—using polymers, elastomers, hydrogels, and other flexible materials—has opened new frontiers in robotics, enabling applications in medical devices, search and rescue, wearable robots, and bioinspired locomotion. These robots rely on fluidic actuators, shape-memory materials, and compliant mechanisms to replicate the versatility and adaptability of living systems.
This article provides a detailed overview of soft robotics and non-metallic bodies, exploring materials, actuation mechanisms, sensing, modeling, applications, challenges, and future directions.
1. Fundamentals of Soft Robotics
1.1 Definition and Key Features
Soft robots are robots constructed primarily from compliant, flexible, and stretchable materials. Key characteristics include:
- High compliance: Can deform significantly without damage
- Safe human interaction: Reduced risk of injury compared to rigid robots
- Morphological adaptability: Can navigate unstructured environments
1.2 Advantages Over Traditional Rigid Robots
| Feature | Soft Robotics | Rigid Robotics |
|---|---|---|
| Material | Elastomers, polymers, hydrogels | Metals, alloys |
| Compliance | High, adapts to surroundings | Low, fixed geometry |
| Safety | Intrinsically safe | Requires sensors/controls for safe interaction |
| Locomotion | Bioinspired crawling, undulating, rolling | Wheels, legs, tracks |
| Manipulation | Gentle grasping | High-force but rigid grip |
2. Non-Metallic Body Materials
2.1 Polymers and Elastomers
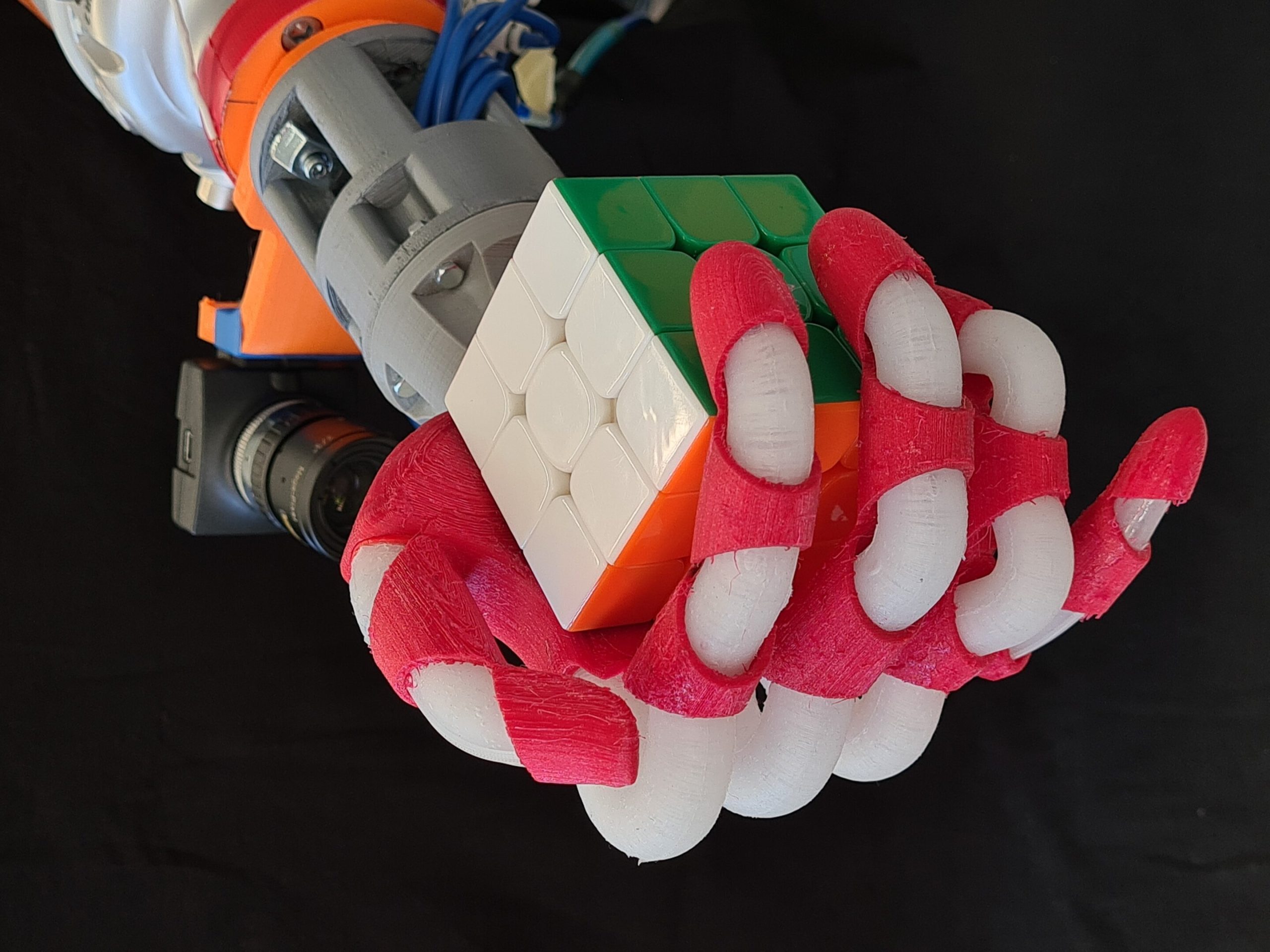
- Silicone Elastomers: Highly elastic, durable, and biocompatible; widely used in soft grippers and wearable devices
- Polyurethane: Offers tunable stiffness and fatigue resistance; suitable for actuators and structural elements
2.2 Hydrogels
- Water-rich polymers with high deformability
- Can swell, contract, or change shape in response to stimuli (pH, temperature, electric fields)
- Applications: soft actuators, artificial muscles, and biomedical devices
2.3 Shape-Memory Polymers (SMPs)
- Recover a predefined shape under heat, light, or electric stimulation
- Enable self-deforming structures and adaptive morphologies
2.4 Composite Non-Metallic Materials
- Combine polymers with carbon nanotubes, graphene, or liquid metals
- Provide enhanced electrical conductivity and mechanical strength
- Allow integrated sensing and actuation in a single material
3. Actuation Mechanisms in Soft Robotics
3.1 Pneumatic and Hydraulic Actuators
- Pneumatic networks (PneuNets): Chambers inflated to create bending or elongation
- Hydraulic soft actuators provide higher forces and precision
- Applications: soft grippers, walking robots
3.2 Electroactive Polymers (EAPs)
- Deform under an applied electric field
- Enable compact, lightweight actuation without bulky pumps
3.3 Shape-Memory and Thermally Activated Materials
- Polymers or composites that change shape in response to heat
- Used in deployable soft structures and bioinspired movement
3.4 Magnetic and Stimuli-Responsive Materials
- Magnetic particles embedded in elastomers
- Controlled remotely via magnetic fields
- Applications: minimally invasive surgical robots and micro-robots
4. Sensing in Soft Robots
4.1 Soft Sensors
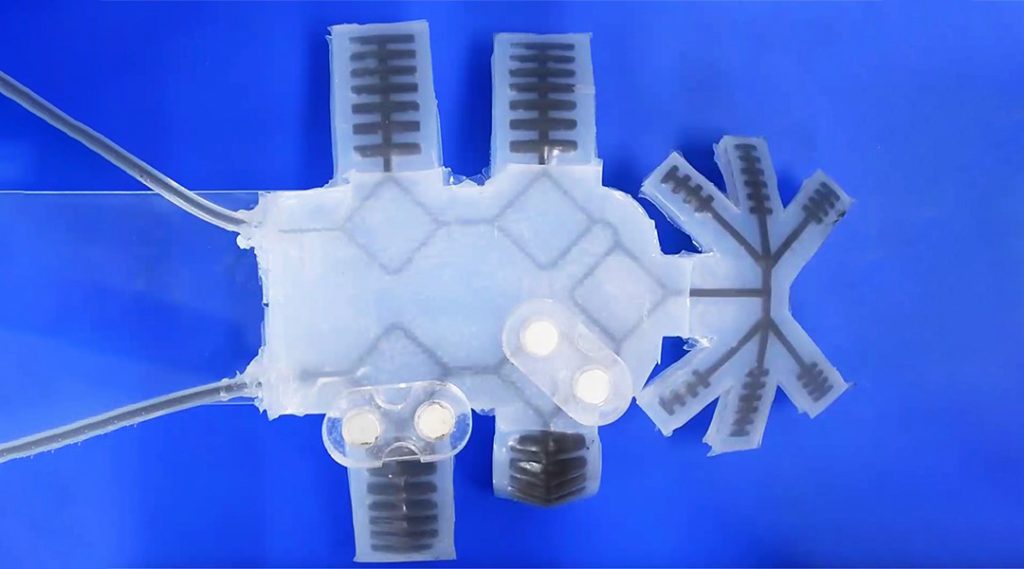
- Piezoresistive and capacitive sensors detect strain, pressure, and deformation
- Embedded into soft bodies for continuous feedback
4.2 Optical and Fiber-Based Sensors
- Fiber Bragg gratings measure stretching and bending
- Suitable for high-resolution proprioception in soft limbs
4.3 Fluidic and Hydrogel Sensors
- Measure changes in fluid pressure or swelling to infer force and position
- Compatible with soft robotic architectures
4.4 Integration of Sensing and Actuation
- Soft robots often integrate actuation and sensing in the same material, enabling real-time feedback
- Facilitates adaptive control and safe human interaction
5. Modeling and Control
5.1 Challenges in Soft Robotics Modeling
- Highly nonlinear, hyperelastic behavior
- Infinite degrees of freedom in continuum bodies
- Interaction with unstructured environments
5.2 Computational Techniques
- Finite Element Analysis (FEA)
- Simulates deformation and stress distribution
- Useful for material selection and actuator design
- Cosserat Rod Models
- Approximates continuum limbs as flexible rods
- Efficient for real-time simulation
- Machine Learning Approaches
- Neural networks learn deformation dynamics
- Useful when analytical models are intractable
5.3 Control Strategies
- Open-loop control: Simple actuation sequences
- Closed-loop control: Feedback from embedded sensors for adaptive motion
- Reinforcement learning: Enables robots to adapt to complex tasks and environments
6. Applications of Soft Robotics with Non-Metallic Bodies
6.1 Medical and Wearable Robotics
- Soft exosuits assist human motion while reducing risk of injury
- Minimally invasive surgical robots navigate delicate tissues
- Soft prosthetics adapt to user anatomy and gait
6.2 Bioinspired Locomotion
- Crawling, swimming, and undulating robots mimic octopuses, worms, and fish
- Non-metallic bodies allow compliant, energy-efficient movement in unstructured terrain
6.3 Search and Rescue
- Soft robots can squeeze through debris in disaster zones
- Adaptable bodies reduce risk of getting stuck
6.4 Industrial and Agricultural Applications
- Gentle handling of delicate produce using soft grippers
- Non-metallic actuators reduce contamination risks in food and pharmaceutical industries
6.5 Micro-Robotics and Soft Micromanipulators
- Hydrogel-based micro-robots for drug delivery and environmental monitoring
- Soft actuators provide safe interaction at small scales
7. Challenges and Limitations
| Challenge | Possible Solutions |
|---|---|
| Limited Force Output | Use hydraulic actuators, hybrid structures, or material composites |
| Slow Response Time | Optimize actuator geometry, use high-speed EAPs or pneumatic pumps |
| Durability and Fatigue | Reinforce elastomers, implement multi-layer designs, use wear-resistant coatings |
| Complex Modeling | Combine FEA with machine learning, real-time sensor feedback |
| Integration with Electronics | Develop stretchable circuits, soft sensors, and wireless communication modules |
8. Future Directions
8.1 Hybrid Soft-Rigid Robots
- Combine soft, compliant bodies with rigid elements for strength and precision
- Enables high-load manipulation with safe interaction
8.2 Advanced Non-Metallic Composites
- Carbon-based, conductive elastomers allow integrated sensing, actuation, and energy storage
- Lightweight and durable for industrial and wearable applications
8.3 Bioinspired and Self-Healing Materials
- Mimic biological tissues that repair themselves after damage
- Extend operational lifetime in harsh environments
8.4 Autonomous Soft Robots
- AI-driven control for adaptive behavior in unstructured environments
- Multi-functional capabilities such as swimming, crawling, or manipulation
8.5 Environmental and Sustainable Materials
- Biodegradable polymers for eco-friendly soft robots
- Reduction in reliance on metals and non-renewable resources
9. Conclusion
Soft robotics with non-metallic bodies represents a revolution in robotics design, enabling:
- Safe human interaction
- Adaptation to unstructured and dynamic environments
- Bioinspired locomotion and delicate manipulation
Key innovations in polymers, hydrogels, elastomers, and composites have made it possible to create robots that are flexible, compliant, and multifunctional. Integration of advanced sensing, machine learning, and bioinspired design further enhances the capabilities of these robots, opening opportunities in medicine, industry, agriculture, search and rescue, and micro-robotics.
Despite challenges such as limited force, durability, and modeling complexity, ongoing research in hybrid structures, self-healing materials, and sustainable non-metallic composites promises a future where soft robots are ubiquitous, versatile, and environmentally friendly.
The convergence of soft materials, intelligent actuation, and adaptive control is positioning soft robotics as a cornerstone of the next generation of robotics, redefining how machines interact with humans and the world around them.