
{kind=link}
{kind=link}
Introduction: Reimagining Robotic Manipulation Hardware
Robotic manipulation has traditionally been dominated by rigid arms with fixed end‑effectors—grippers or hands that are mounted at the end of a stationary manipulator and designed to approach and grasp objects within a predictable workspace. Such configurations excel in structured industrial contexts but face fundamental limitations when tasked with accessing tight spaces, reaching around obstacles or adapting to diverse and unpredictable environments.
A radical shift in manipulation hardware is now emerging: dislocatable, multi‑directional, or “脱臼式” robotic gripper hands that break free from this conventional paradigm by combining locomotion and grasping, expanding both reachability and dexterity. One of the most compelling innovations in this vein is the detachable robotic hand capable of crawling autonomously to grasp objects, developed by researchers at EPFL and further explored at institutions like Wuhan University.
This article provides a professional, in‑depth exploration of this evolving field, covering the motivation behind dislocatable gripper hardware, the technological principles, real‑world prototypes, performance and control challenges, applications, comparisons with traditional systems, and future prospects for robotics hardware and embodied intelligence.
1. The Traditional Manipulation Paradigm and Its Limitations
For decades, robotic manipulation has relied on robotic arms and end‑effectors with rigid kinematic structures:
- Fixed mounting: End‑effectors are attached to a base arm with limited reach.
- Planar grasping: Most grippers operate with constrained approach vectors and “line‑of‑sight” access.
- Workspace restrictions: Objects in tight or occluded spaces are difficult or impossible to grasp reliably.
Even sophisticated grasp planning algorithms such as DexNet—using deep neural networks to evaluate grasp quality—operate within the constraints of these fixed manipulators, assessing possible approaches and positions but not changing the robot’s morphology or pose to gain new access.
As robots proliferate into unstructured environments—homes, factories with clutter, confined pipes, disaster sites, or surgical contexts—the demand for manipulators that can move independently of their base to reach and manipulate targets is becoming increasingly clear. This has motivated research into self‑reconfiguring hardware, soft and modular grippers, and now truly dislocatable gripper hands that can actively adapt their position and approach strategy.
2. A Breakthrough: Detachable Crawling Robotic Hands
2.1 What Is a Dislocatable or Crawling Robotic Hand?
A dislocatable robotic hand is an end‑effector that can physically detach from its host robotic arm and perform autonomous movement—typically crawling or locomoting—within the environment to position itself for grasping tasks that the arm could not reach directly.
Unlike conventional end‑effectors that rely on the base robot’s mobility, this new class of hardware combines locomotion and manipulation in one device, enabling unprecedented reach and dexterity:
- Self‑locomotion—the hand can crawl into tight spaces independently.
- Multi‑directional grasping—fingers and appendages can oppose from front and back, enabling novel grasp strategies.
- Reattachment capability—after task completion, the hand can re‑dock with the host robot.
This hardware blurs the line between a manipulator and a mobile manipulator, creating a hybrid agent that can proactively relocate its grasping module.
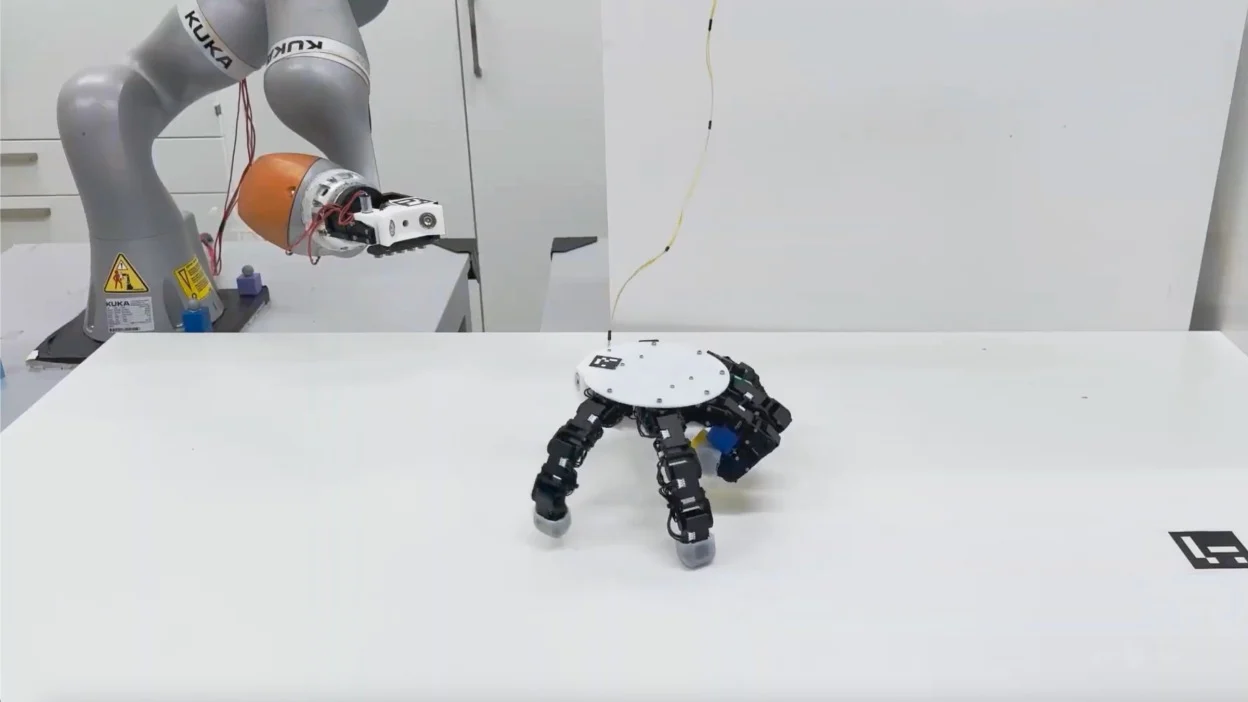
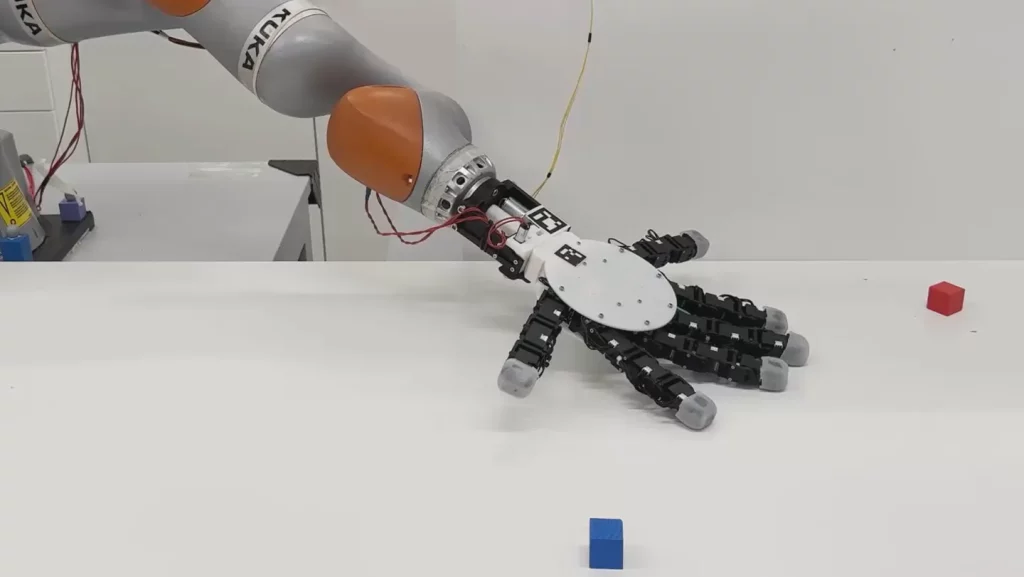
2.2 Notable Prototype: EPFL Detachable Crawling Hand
A recent prototype developed by researchers at the Swiss Federal Institute of Technology in Lausanne (EPFL) exhibits some of the most exciting advances to date:
- The robotic hand detaches at the wrist and can crawl independently to the target.
- It is capable of grasping objects from both sides thanks to reversible finger configurations.
- The system can handle multiple objects simultaneously and locomote through constrained spaces.
- After completing its sub‑task, the hand can return and reattach to the robotic arm.
This dual‑mode operation—combining autonomous locomotion and fine manipulation—fundamentally expands the operational envelope of robotic systems.
3. Technical Principles Behind Dislocatable Manipulation
3.1 Combining Locomotion With Manipulation
One core innovation is integrating locomotive mechanisms directly into the gripper hardware, enabling it to “crawl” like a small multi‑legged robot or a crawling appendage:
- Each finger or segment may incorporate motorized joints and locomotion actuators.
- Advanced gait strategies allow the detached hand to climb, reposition, or approach targets from multiple angles.
- Locomotion and manipulation planning are jointly optimized based on environmental perception and task goals.
This fusion contrasts starkly with classical robotic arms, where locomotion and gripping are decoupled functions executed by separate physical systems.
3.2 Multi‑Modal Manipulation Capabilities
Traditional grippers rely on simple closing motions or parallel jaw mechanisms for grasping. By contrast, dislocatable gripper hands may incorporate:
- Reversible multi‑finger configurations enabling grip from back or front sides.
- Advanced fingertip designs with soft materials or tactile sensors for adaptive compliance.
- Bio‑inspired mechanics allowing complex wrapping or enveloping grasps, similar to soft robotics research in shape‑morphing grippers.
These capabilities provide robustness in handling a wide range of object shapes and sizes without extensive pre‑programmed grasp strategies.
4. Performance and Control Challenges
4.1 Coordinating Independent and Base Robot Motions
One of the central control challenges is coordinating the detached gripper’s autonomous motion with the host robot:
- Ensuring safe separation and re‑docking procedures.
- Planning multi‑agent motion paths to avoid collisions.
- Handling environmental uncertainty during autonomous crawling.
Advanced perception systems, often incorporating depth sensors, vision systems, and proprioceptive feedback, are crucial to enabling this coordination.
4.2 Balancing Dexterity, Weight, and Power
Integrating locomotion mechanisms and manipulation hardware in a single module increases mechanical complexity, weight, and power demands:
- Lightweight materials and efficient actuators are essential to maintain agility and reduce energy consumption.
- Compliance and safety measures must be integrated to prevent damage in constrained environments.
Research in modular soft grippers and variable stiffness actuators offers parallel insights into how dislocatable hands might balance rigidity and compliance for effective performance.
5. Applications Beyond Traditional Manipulation
5.1 Industrial Inspection and Maintenance
Dislocatable gripper hands can enter confined spaces in machinery, pipelines, and assemblies, performing inspection and retrieval tasks without requiring full robot base navigation. This capability is particularly valuable in complex manufacturing and maintenance operations where space restrictions are common.
5.2 Exploration and Disaster Response
In disaster zones or search‑and‑rescue missions, robots often need to reach behind debris or into collapsed structures. A crawling gripper hand enables fine manipulation and object retrieval in environments too dangerous or inaccessible for human operators or traditional robots.
5.3 Prosthetics and Human Augmentation
The nuanced motion and independent mobility of such grippers may inspire next‑generation prosthetic limbs or augmentative appendages that exceed human reach and dexterity while maintaining intuitive control.
6. Comparisons with Conventional Manipulation Hardware
| Feature | Fixed Robotic Arm + Gripper | Dislocatable/Crawling Gripper Hand |
|---|---|---|
| Workspace Reach | Limited to arm reach | Can extend into tight/confined spaces |
| Autonomy | Dependent on base motion | Independent crawling + manipulation |
| Dexterity | Typically fixed approach | Multi‑directional, reversible grip |
| Complexity | Moderate | Higher mechanical & control complexity |
| Adaptability | Lower in clutter | High in unstructured environments |
Dislocatable hands do not replace traditional manipulators; rather, they augment robotic systems, enabling new task classes that were previously impractical or impossible with fixed arms alone.
7. Integration with Embodied AI and Future Robotics Architectures
7.1 Embodied Intelligence and Grasp Planning
Advanced algorithms—such as deep learning‑based grasp planners that generalize across objects—must be adapted to the increased degrees of freedom and locomotion capabilities of dislocatable hands. The D(R, O) grasp framework being developed is one such attempt to bring generalizable robot dexterity closer to human performance.
7.2 Modular and Self‑Reconfigurable Systems
Longer‑term visions include modular robotic systems where components can reassemble themselves into graspers, crawlers, or other functional tools based on task demands. Such reconfigurability builds on research in self‑reconfiguring robotic modules.
The integration of dislocatable hands into larger robotic ecosystems promises machines that can adapt not just their motion and grasp strategies, but also their entire physical configuration to meet complex, evolving challenges.
8. Ethical, Safety, and Practical Considerations
With increased autonomy and independent motion comes a need for robust safety protocols:
- Ensuring safe operation around humans and physical hazards.
- Implementing failsafe reattachment and recovery strategies.
- Addressing ethical concerns over autonomous hardware detached from central control.
Regulatory frameworks will need to evolve with these capabilities to ensure safe deployment in industrial and public domains.
Conclusion: The Road Ahead for Dislocatable Robotic Manipulators
The development of dislocatable and crawling robotic gripper hands represents a paradigm shift in robotic manipulation hardware. By breaking free from the constraints of fixed manipulators and integrating locomotion directly into grasping modules, researchers are unlocking a new class of robotic behavior with far‑reaching implications for industry, exploration, service robots, and human augmentation.
While significant challenges remain—in control, energy efficiency, perception, and safety—the potential of these systems to operate in unstructured spaces and perform complex, multi‑directional manipulation tasks suggests a rich future for robotics hardware beyond traditional arms. As embodied intelligence and adaptive hardware continue to mature, dislocatable grippers will likely become key components in next‑generation autonomous machines.