
{kind=link}
{kind=link}
Introduction
The rapid evolution of robotics technology has reached a pivotal stage in both industrial and service sectors, driven by the convergence of advanced perception systems, intelligent control algorithms, and robust human–machine collaboration (HMC) safety systems. Modern robots are no longer isolated cages of motion; they are designed to operate with humans—sharing space, tasks, and responsibilities. The incorporation of reliable safety systems into robots is not just a convenience but a core requirement for real‑world applications where human interaction is frequent and essential.
This article explores why robots equipped with dependable human–machine collaboration safety systems are becoming focal points in industrial automation and service robotics. We will delve into the technical foundations of safe collaboration, regulatory standards, emerging industrial and service applications, evaluation methodologies, key enabling technologies, industry trends, implementation challenges, and future prospects. Through this detailed, professional analysis, readers will gain a holistic understanding of how safety‑centric collaborative robots (cobots and service robots) are reshaping workplaces and human interaction with machines.
1. The Rise of Human–Machine Collaboration
1.1 Historical Context
Historically, industrial robots were designed for repetitive tasks in structured environments, relegated to fenced areas to protect human workers from accidental contact with highly dynamic and forceful machines. These early systems emphasized performance and precision over human interaction. However, with rising labor costs, shrinking workforces in developed economies, and demand for flexible manufacturing systems, the paradigm has shifted toward robots that can safely coexist with humans.
1.2 From Automation to Collaboration
Human–machine collaboration (HMC) represents an evolution from traditional automation to an integrated workspace where robots and humans cooperate on shared tasks—combining human dexterity and judgment with robotic precision and endurance. This shift requires fundamental changes in robot design philosophy:
- Machines must be predictable and controllable
- Robots need to sense and interpret human presence
- Safety systems must ensure damage prevention without hindering productivity
As a result, safety is no longer an add‑on, but a foundational aspect of robot design.
2. What Constitutes a Reliable HMC Safety System?
A human–machine collaboration safety system is an integrated ensemble of hardware and software designed to ensure human well‑being while maximizing productivity. A comprehensive system typically includes:
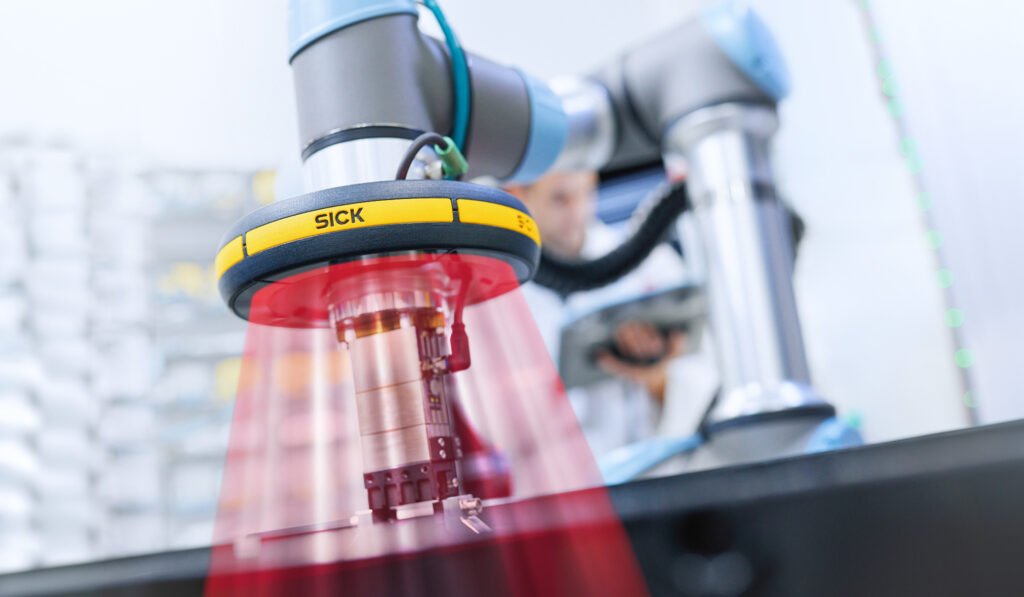
2.1 Perception and Sensing Modules
Robots use a suite of sensors to detect human presence and motion:
- Vision systems (RGB, depth cameras)
- LiDAR and radar sensors
- Proximity and capacitive sensors
- Force/torque sensors and tactile skins
These sensors enable a robot to perceive humans and obstacles in real time and react appropriately.
2.2 Safety‑Certified Control Algorithms
To effectively translate perception into safe action, robots must implement control algorithms that:
- Predict human motion and intent
- Slow or stop robot motion before contact
- Adjust paths smoothly to avoid hazards
- Balance safety with task productivity
This often involves real‑time path planning and adaptive motion control.
2.3 Force and Torque Limiting Mechanisms
Collaborative robots (cobots) often employ force and torque limiting at the hardware level:
- Series Elastic Actuators (SEAs) absorb impact
- Compliant joints reduce harmful forces
- Current and torque thresholds halt motion upon excess force
These mechanisms help ensure that unexpected human contact does not result in injury.
2.4 Redundant and Fail‑Safe Architectures
Safety systems must include:
- Hardware redundancy for critical sensors and control channels
- Emergency stop circuits accessible to operators
- Safe operation modes that drastically reduce speed and force upon fault detection
Fail‑safe design ensures that in the event of malfunction, the robot transitions to a safe state.
2.5 Human Intention Recognition (Future Forward)
Emerging safety systems incorporate human intention recognition, where predictive models infer what a person is likely to do next—e.g., reach for an object—to pre‑emptively adjust robot behavior.
3. Regulatory and Standards Landscape
The integration of safety systems into robots occurs within a framework of international standards and regulations designed to minimize risk in human environments.
3.1 ISO 10218: Safety of Industrial Robots
ISO 10218 outlines safety requirements for industrial robots and robot systems, including collaborative applications. It specifies:
- Safety requirements for robot design
- Risk assessment processes
- Requirements for protective measures and control systems
3.2 ISO/TS 15066: Collaborative Robot Safety
ISO/TS 15066 specifically addresses cobots, providing technical specifications for:
- Collaborative operation modes
- Contact force limits
- Safety‑related design considerations
- Task risk assessment methodologies
These standards emphasize risk reduction through design rather than reliance solely on enclosures and barriers.
3.3 IEC 61508 / IEC 62061: Functional Safety of Control Systems
These standards govern functional safety, particularly:
- Safety Integrity Levels (SIL)
- Hardware and software safety lifecycle
- Design and verification of safety‑related control systems
Adherence ensures robustness against faults that could compromise safety.
3.4 National and Regional Regulations
Regional agencies, such as the European Machinery Directive, U.S. OSHA, and Chinese safety regulations, incorporate international standards into local legal frameworks, affecting adoption and certification.
4. Industrial Applications: Where Safety‑centric Robots Thrive
Human–machine collaboration robots have found significant traction in multiple industrial segments.
4.1 Collaborative Assembly and Manufacturing
Cobots safely assist humans on assembly lines by performing tasks such as:
- Screwing and fastening
- Part alignment
- Material handling
- Quality inspection
Because cobots operate at lower speeds and with force limits calibrated to human safety, barriers are unnecessary, improving flexibility and throughput.
4.2 Packaging and Logistics
In warehouses and distribution centers:
- Cobots transport goods alongside workers
- Resolve bottlenecks in fulfillment workflows
- Reduce repetitive strain injuries
Modern safety systems ensure that robots gracefully decelerate when humans move into proximity.
4.3 Automotive and Aerospace
These sectors have adopted collaborative robots for precision tasks:
- Riveting and welding with human guidance
- Inspection of hard‑to‑reach areas
- Support for custom or low‑volume production
Safety requirements are stringent given the high risks associated with heavy tools and moving equipment.
4.4 Electronics and Precision Manufacturing
In electronics production, delicate components require:
- Precision handling
- Human oversight for quality assurance
- Real‑time adaptation to human presence
Advanced perception and safety systems enable robots to coexist safely with technicians handling fine tasks.
5. Service Robotics: Extending Safety to Unstructured Environments
Beyond industrial use, safety‑centric human‑robot collaboration extends into service domains where robots interact with people in everyday settings.
5.1 Healthcare and Rehabilitation Robotics
Service robots assist in:
- Patient mobility and support
- Rehabilitation exercises
- Delivery of medications
Robots in these environments must be highly responsive to human motion and condition—safety systems must interpret proximity and vulnerability, especially for elderly or impaired users.
5.2 Hospitality and Customer Service
Service robots in hotels, airports, and retail spaces perform tasks like:
- Guiding guests
- Delivering items
- Providing information
These robots interact with diverse populations, including children and elders, requiring robust collision avoidance and safe reaction behavior.
5.3 Domestic Assistance
In homes, robots help with:
- Cleaning
- Fetching objects
- Companionship tasks
Domestic settings are unpredictable, and safety systems must operate without the structured safeguards typical in factories.
5.4 Public Interaction Robots
Robots in museums, events, or public spaces engage crowds. Safety systems are essential for:
- Crowd navigation
- Personal space maintenance
- Unpredictable human motion
Public perception of safety is as important as technical safety compliance.
6. Technical Foundations of HMC Safety Systems
Human–machine collaboration safety systems sit at the intersection of several technological domains.
6.1 Perception and Sensor Fusion
To perceive humans and hazards, robots integrate:
- Vision systems (RGB, depth cameras)
- Proximity sensors (ultrasonic, infrared)
- LiDAR and radar
- Tactile skins and force sensors
Sensor fusion algorithms weigh and combine data to create reliable situational awareness.
6.1.1 Multimodal Sensor Fusion
Multimodal fusion increases robustness against individual sensor failure or environmental interference:
- Visual occlusion compensated by proximity sensors
- Low light handled by infrared systems
- LiDAR provides spatial depth and silhouette information
Fusion architectures range from probabilistic models to deep learning‑based representation learners.
6.2 Real‑Time Motion Planning and Control
Safety systems must translate perception into action swiftly:
- Trajectory planning respecting human positions
- Velocity and acceleration constraints to limit risk
- Reactive control loops for immediate hazard responses
Model Predictive Control (MPC) and sampling‑based planners (e.g., RRT*, PRM) are often adapted for safety‑oriented constraints.
6.3 Force Control and Compliance
Force and torque sensors, along with compliant actuators, enable safe contact:
- Detecting unexpected contact
- Reducing stiffness in collaborative zones
- Allowing controlled compliance when humans and robots interact
Control frameworks such as impedance or admittance control help modulate interaction forces.
6.4 Learning‑Enabled Safety
Machine learning enhances safety further by:
- Predicting human motion and intent
- Adapting safety boundaries dynamically
- Improving response strategies through experience
Reinforcement learning and imitation learning contribute to safer interaction policies.
7. Evaluating Human–Machine Safety Systems
Building safety systems is only half the battle—evaluating them rigorously is equally essential.
7.1 Risk Assessment Methodologies
Before deployment, systems undergo structured risk analysis:
- Hazard identification
- Severity and occurrence assessment
- Risk reduction verification
- Residual risk evaluation
Standards like ISO 12100 guide systematic risk evaluation.
7.2 Validation in Simulated and Real Environments
Simulation tools (e.g., Gazebo, NVIDIA Isaac) allow safe validation of behaviors before field tests. Real‑world testing confirms:
- Response time to human proximity
- Compliance with speed and force limits
- System recovery upon fault detection
7.3 Certification and Regulatory Compliance
Robots must undergo certification against relevant safety standards and local regulatory requirements before industrial or public deployment.
8. Industry Trends Driving Adoption
Several macro trends are accelerating the adoption of safety‑centric collaborative robots.
8.1 Labor Shortages and Demographic Shifts
Aging populations and skill shortages in developed economies drive demand for robots that can augment human labor safely rather than replace it fully.
8.2 Flexible Manufacturing Requirements
Industries require reconfigurable assembly systems where robots can be redeployed rapidly with minimal safety retrofitting.
8.3 Cost Reductions in Sensors and Compute
Advances in sensor technologies and affordable compute hardware have reduced the cost barrier for sophisticated perception and safety systems.
8.4 AI‑Enabled Perception and Prediction
Machine learning algorithms now empower robots to understand human motion and behavior classes, enabling proactive safety adjustments.
9. Challenges in Implementing Reliable HMC Safety Systems
Even with progress, significant challenges remain.
9.1 Sensor Limitations and Environmental Variability
- Visual occlusions in cluttered spaces
- Reflective or transparent surfaces that confuse sensors
- Dynamic lighting conditions
Robust perception under variability remains a core research area.
9.2 Balancing Safety and Productivity
Overly conservative safety constraints can reduce efficiency. Finding the right balance between risk avoidance and operational efficiency is complex and context dependent.
9.3 Non‑Deterministic Human Behavior
Humans can behave unpredictably. Robust safety systems must handle:
- Sudden movements
- Drowsy or inattentive behavior
- Intent ambiguity
Human intention prediction is an emerging research area in safety.
9.4 Standardization Across Use Cases
Safety standards must evolve to address diverse applications—from factories to homes—without being overly restrictive.
10. Case Studies
10.1 Automotive Assembly with Cobots
In automotive plants, cobots collaborate with technicians on tasks like:
- Component insertion
- Quality inspection
- Ergonomically challenging manual tasks
Safety systems here include human posture detection and enforced speed/force limits when workers approach shared workspaces.
10.2 Logistics Fulfillment Centers
Fulfillment centers utilize collaborative mobile robots that navigate aisles alongside workers:
- Map human motion patterns
- Predict traffic flows
- Slow or reroute when humans are nearby
Such systems increase throughput while minimizing collision risk.
10.3 Healthcare Social Assistants
In healthcare settings, robots assist nurses and patients:
- Guiding mobility for the elderly
- Delivering medicines
- Monitoring patient status
These applications emphasize gentle force profiles and human intention interpretation to ensure safety and trust.
10.4 Retail and Hospitality Robots
Service robots in retail spaces interact with customers:
- Greeting visitors
- Providing directions
- Answering queries
Safety systems here include proximity understanding, emotional state cues (tone and body language), and socially appropriate motion planning.
11. Future Directions
As robotics continues to evolve, the importance of robust HMC safety systems will only grow.
11.1 Predictive Human Intention Models
Future systems will integrate predictive models that anticipate human actions and adjust robot plans before risky interactions occur.
11.2 Adaptive Safety Zones
Instead of fixed safety boundaries, robots will employ dynamic safety zones that adapt in real time based on task context and human movement.
11.3 Federated Learning for Safety Profiles
Robots across facilities can share anonymized interaction and safety data to improve collective safety policies via federated learning.
11.4 Regulatory Framework Evolution
Regulation will evolve to include performance‑based safety certifications, enabling innovation while ensuring protection.
Conclusion
Robots equipped with reliable human–machine collaboration safety systems are rapidly becoming hotspots in both industrial and service domains. Whether on factory floors, in warehouses, hospitals, or public spaces, safety is no longer an ancillary feature but a core determinant of adoption and effectiveness.
The convergence of advanced perception systems, adaptive control algorithms, compliant actuation, and robust safety standards has enabled robots to not just operate near humans, but to collaborate with them safely and effectively. As robotics technology continues to advance, the integration of predictive human behavior models, adaptive safety frameworks, and learning‑based safety optimization will further enhance trust, productivity, and real‑world utility.
In a world where robots and humans increasingly share tasks and working spaces, the importance of reliable human–machine collaboration safety systems cannot be overstated. These systems are not merely technical requirements—they are the foundation upon which future autonomous workplaces and service ecosystems will be built.