
{kind=link}
{kind=link}
Introduction
The field of micro and bioinspired robotics represents a frontier in engineering and artificial intelligence, where lessons from nature, biology, and miniaturization converge to create highly adaptive, efficient, and specialized robotic systems. These robots operate at micro- or millimeter scales or adopt biological principles such as locomotion mechanisms inspired by insects, fish, or mammals, enabling them to navigate environments that are inaccessible to traditional machines.
Two distinct yet interconnected domains define this technological landscape:
- Microrobotics: Robots at sub-millimeter to centimeter scales, often designed for precision tasks in medicine, manufacturing, or exploration.
- Bioinspired Robotics: Systems that emulate biological structures, locomotion patterns, or sensory strategies, providing enhanced efficiency, adaptability, and resilience.
Together, these approaches are redefining how robotics can be applied—from targeted drug delivery and minimally invasive surgery to environmental monitoring and industrial inspection. This article provides a comprehensive analysis of the state-of-the-art technologies, design principles, applications, challenges, and future directions for micro and bioinspired robotics.
1. Microrobotics: Tiny Machines with Big Potential
1.1 Defining Microrobots
Microrobots are miniaturized robotic systems, typically ranging from tens of micrometers to a few centimeters. Key characteristics include:
- Precision: Ability to manipulate objects or perform tasks at micro scales.
- Swarm Capability: Often deployed in large numbers to collectively achieve tasks.
- Energy Efficiency: Limited onboard power requires innovative propulsion and actuation methods.
1.2 Actuation Mechanisms
Microrobotics employs a variety of actuation strategies:
- Magnetic Actuation
- Remote control using external magnetic fields.
- Common in medical microrobots for minimally invasive procedures.
- Piezoelectric Actuation
- Converts electrical signals into mechanical motion.
- Offers high precision and rapid response at micro scales.
- Light-Driven Actuation
- Uses optical stimuli to induce movement in photosensitive materials.
- Particularly suitable for bio-compatible and soft microrobots.
- Chemical and Catalytic Propulsion
- Micro-robots harness chemical reactions to self-propel in fluids.
- Often applied in targeted drug delivery.
1.3 Applications of Microrobots
- Medical Field
- Targeted drug delivery to tumors or localized infections.
- Micro-surgery inside blood vessels or narrow tissue channels.
- Industrial Applications
- Micro-assembly of electronic components.
- Inspection and cleaning in microfluidic systems.
- Environmental Monitoring
- Water quality sensing using micro-swimmers.
- Detection of chemical or biological contaminants in confined spaces.
1.4 Challenges
- Power Supply: Limited energy storage constrains autonomy.
- Navigation and Control: Requires precision in dynamic environments.
- Fabrication Complexity: Manufacturing at micro scales is technologically demanding.
2. Bioinspired Robotics: Nature as a Blueprint
2.1 Principles of Bioinspiration
Bioinspired robotics leverages biological strategies to improve efficiency, adaptability, and robustness. Core design principles include:
- Morphology Mimicry: Copying structures such as wings, legs, or fins.
- Locomotion Strategies: Adopting movement patterns like crawling, swimming, or jumping.
- Sensory Adaptation: Mimicking biological perception (e.g., whiskers, compound eyes).
2.2 Notable Bioinspired Robots
- Insect-Inspired Robots
- Micro-robots with six legs for stability on uneven surfaces.
- Capable of climbing and navigating tight spaces.
- Fish-Inspired Robots
- Flexible fins allow energy-efficient swimming.
- Used in underwater exploration and monitoring.
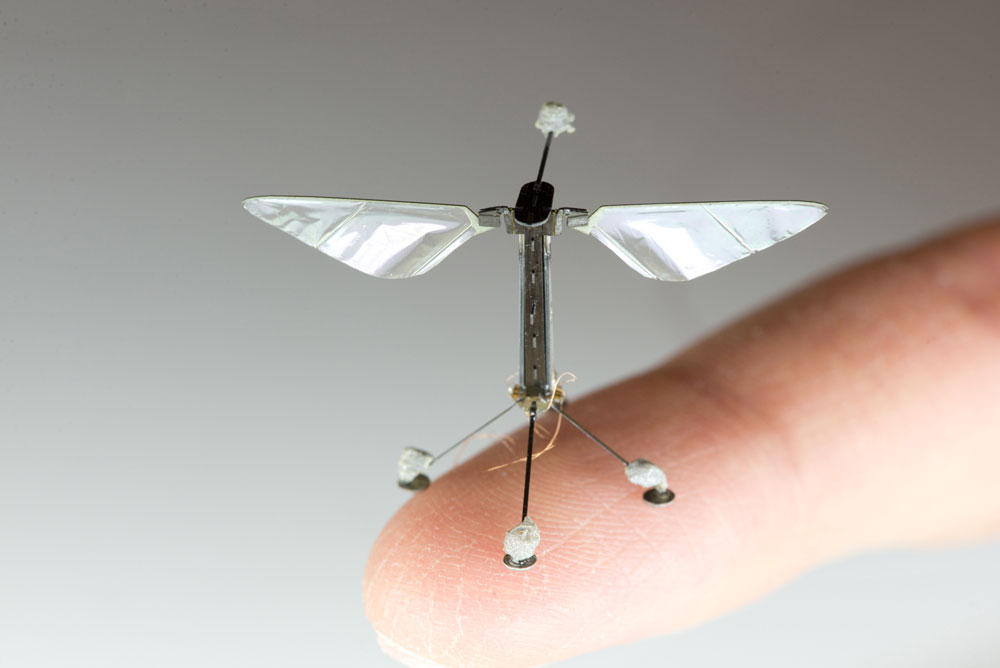
- Bird and Bat-Inspired Robots
- Flapping-wing robots emulate avian flight for aerial exploration.
- Incorporates energy-efficient aerodynamics and maneuverability.
- Soft Robots Inspired by Octopus or Worm Locomotion
- Use deformable materials for adaptability and safe interaction.
- Applied in surgical robotics, environmental exploration, and industrial handling.
2.3 Advantages of Bioinspired Design
- Energy Efficiency: Biological principles reduce mechanical complexity and energy consumption.
- Adaptive Locomotion: Enables navigation in complex or unstructured environments.
- Safety and Resilience: Soft bioinspired designs reduce the risk of damage in human-robot interaction.
3. Integration of Microrobotics and Bioinspired Concepts
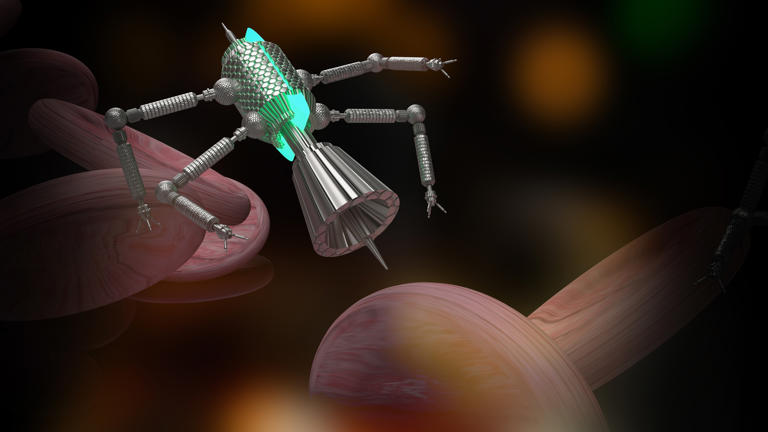
3.1 Miniaturized Bioinspired Robots
- Researchers are combining micro-scale fabrication with bioinspired morphology to create robots that can:
- Crawl through blood vessels or narrow channels.
- Swarm collectively to perform tasks in medical or environmental settings.
3.2 Multimodal Sensing and Control
- Micro-bio robots integrate:
- Optical sensors for environmental perception.
- Chemical sensors for detecting specific molecules or stimuli.
- Tactile feedback mechanisms to navigate confined spaces.
3.3 Swarm Intelligence and Collective Behavior
- Inspired by insect colonies or fish schools, micro-bio robots operate as cooperative swarms, achieving tasks beyond the capability of single robots.
- Applications include: targeted therapy, distributed environmental monitoring, and micro-scale assembly.
4. Industrial and Medical Applications
4.1 Healthcare and Biomedicine
- Targeted Drug Delivery: Micro-robots deliver medication precisely, minimizing systemic side effects.
- Minimally Invasive Surgery: Tiny robots navigate through vessels or organs to perform precision interventions.
- Diagnostics: Swarms of micro-robots detect biomarkers for early disease detection.
4.2 Industrial Applications
- Micro-Manufacturing: Assembly of microchips and micro-mechanical components.
- Inspection and Maintenance: Small robots access areas too narrow or dangerous for humans.
4.3 Environmental Applications
- Water treatment monitoring using micro-swimmers.
- Soil or air sensing in confined environments, leveraging swarm capabilities for distributed data collection.
5. Technical Challenges and Limitations
5.1 Fabrication Constraints
- Achieving mechanical precision and integrating multiple sensors at the micro scale is challenging.
- Advanced materials, such as soft polymers, shape-memory alloys, and bio-compatible composites, are critical.
5.2 Energy and Power Management
- Limited onboard energy necessitates wireless energy transfer or external magnetic actuation.
- Efficiency trade-offs exist between mobility, payload, and operational duration.
5.3 Navigation and Control
- Micro-scale robots require highly accurate localization, often relying on external tracking systems (magnetic, optical, or ultrasonic).
- Swarm behavior demands robust algorithms for coordination without centralized control.
5.4 Regulatory and Safety Concerns
- Medical applications must comply with stringent biocompatibility and safety regulations.
- Environmental deployment must ensure robots do not introduce pollution or ecological risks.
6. Future Directions
6.1 Smart Materials and Soft Robotics
- Use of shape-memory alloys, hydrogels, and responsive polymers for adaptive micro-robots.
- Enables self-healing, flexible, and highly deformable robots.
6.2 AI-Driven Autonomy
- Machine learning algorithms enable micro and bioinspired robots to adapt behavior in real time.
- Swarm intelligence techniques improve task allocation, obstacle avoidance, and environmental mapping.
6.3 Hybrid Systems
- Integration of micro and macro-robots for complex tasks combining precision and strength.
- Example: Micro-robots perform targeted operations while larger robots provide transport or supervision.
6.4 Clinical Translation and Industrial Scaling
- Accelerated development of regulatory-approved medical microrobots.
- Scalable manufacturing processes for mass deployment in industrial inspection, environmental monitoring, and healthcare.
7. Strategic Implications for Industry and Research
- Healthcare: Precision therapies and minimally invasive procedures revolutionize patient care.
- Industrial Manufacturing: Micro-robots enable high-precision, automated assembly of micro-components.
- Environmental Monitoring: Swarms provide distributed sensing in areas inaccessible to humans.
- R&D Priorities: Investment in materials science, microfabrication, AI algorithms, and swarm coordination is essential for global competitiveness.
Conclusion
Micro and bioinspired robotics represents the convergence of engineering, biology, and AI to produce highly adaptable, efficient, and specialized machines. By combining miniaturization, biological inspiration, and intelligent control, these systems open new possibilities in medicine, industry, and environmental applications.
The challenges—energy management, fabrication, control algorithms, and regulatory compliance—are significant, but the potential impact of these technologies is transformative. As research progresses, micro and bioinspired robots are poised to redefine autonomy, precision, and adaptability, driving the next generation of robotic innovation globally.